Handmade RL -3
Handmade RL - third story
나만의 환경 만들기
wonseok Jung
PART1
새로운 환경 만들기

- Unity Environment를 만들기 위한 튜토리얼
-
Unity Environment는 강화학습 에이전트를 훈련 시키기 위해 사용될 수 있다.
Overview
Basic steps to use ML-agent
- 에이전트가 살수 있는 환경을 만든다.
좀 더 추가해야 할 부분
1. Set up the Unity Project
- Unity Editor을 실행 한 뒤 RollerBall의 이름으로 새로운 프로젝트를 생성한다.
- ML-Agents repository를 clone 하였던 폴더로 간다
- unity-environments/Assets에 있는 ML-Agents폴더를 Unity Editor project window로 드래그 한다.

2. Create the Environment
ML-agent environment에서 simple scene를 만들어 보자
- Hierarchy window에서 오른쪽 버튼을 클릭한다.
- 3D object -> plane
- Object의 이름을 Floor라고 지정한다.

2.1 Create the Envrionment-2
- Transform을 수정한다.
- Position =(0,0,0)
- Rotation =(0,0,0)
- scale = (1,1,1)
- Mesh Render에서 Material property를 확장시키고 matrial을 floor로 바꾼다.
3. Add the Target Cube
- Hierarchy window에서 오른쪽 마우스 클릭한 뒤 3D object -> spehere 를 선택한다.
- RollerAgent로 이름을 바꾼다.
-
Target을 선택한뒤 Inspector window에서 properties를 본다.
- Transform을 수정한다.
- Position =(0,0.5,0)
- Rotation =(0,0,0)
- scale = (1,1,1)
3.1 Add the Target Cube-2
- Mesh Render에서 Material property를 확장시키고 matrial을 checker 1로 바꾼다.
- Add Component를 클릭한다.
- 이것을 Physics/Rigidbody에 추가한다.

4. Add Empty GameObjects to Hold the Academy and Brain
- Hierarchy window에서 오른쪽 마우스 클릭한 뒤 Create Empty 를 선택한다.
- Academy로 이름을 바꾼다.
- Academy를 선택한 뒤 오른쪽 마우스 클릭한 뒤 Create Empty를 선택한다.
- Brain로 이름을 바꾼다.

5.Implement an Academy
- Academy obeject를 선택하여 Inspector 창을 연다.
- Add Component 선택
- New SCript선택
- RollerAcademy로 이름 변경
- Creat and Add 선택
5.1 Edit the newollerAcademy sciprt
1.RollerAcademy를 더블클릭
2.Editor가 열리면, base class의 MonoBehaviour을 Academy로 변경한다.
3.Start(), Update() 를 지운다.
6. Add the Brain
- 생성한 Brain을 선택하여 Inspector 창을 연다.
- Add Component 선택
- Brain type을 Player
Clear error 발생시
Edit -> Project Settings -> Player
Then in the inspector under "Other Settings" select the .NET 4.6 equivalent Scripting Runtime Version.
7. Implement an Agent
- RollerAgent 를 선택한뒤 inspector창을 연다
- Add Component
- New Script
- RollerAgent로 이름을 바꾼다
- Create and Add 선택
7.1 Edite new RolleraAgent
1.RollerAgent 를 더블클릭
2.Editor가 열리면, base class의 MonoBehaviour을 Agent로 변경한다.
3.Start(), Update() 를 지운다
So far
- 지금까지 Unity project에 ML-Agent를 add하는 작업을 했다.
- Agent가 Cube를 굴릴수 있도록 강화학습을 통해 학습시켜보자
Part 2
1. Initialization and Resetting the Agent
-
Agent가 Target에 도착하면 상태를 초기화 시킨다. Agent가 platform 밖으로 떨어지면 다시 위로 올려놓는 작업을 자동으로 해주는 것이 필요하다.
- Target object를 옮기는 방법 :
- Transform을 사용:
-
add a public field of type transform to Roller agent
- Agent 속도를 reset하기 위한 작업
- Regibody는 Unity’s physics simulation의 주요 구성이다.
- 이 reference를 사용하기 위해서해서 Gameobject.GetComponent
()를 사용하는 방법이 가장 좋다. - Rigibody는 Start() script를 사용하여 부를수 있다.
Roller agent script는 다음과 같다.
public class RollerAgent : Agent {
Rigidbody rBody;
void Start ()
{
rBody = GetComponent<Rigidbody>();
}
public Transform Target;
public override void AgentReset()
{
if (this.transform.position.y < -1.0)
{
//에이전트가 떨어지면
this.transform.position = Vector3.zero;
this.rBody.angularVelocity = Vector3.zero;
this.rBody.velocity = Vector3.zero;
}
else
{
//타겟을 새로운 곳으로 옮긴다.
Target.position = new Vector3(Random.value * 8 - 4,
0.5f,
Random.value * 8 - 4);
}}}
Observing the Environment
- Agent는 information을 보내고 이 information을 사용하여 결정을 내린다.
- 에이전트 혹은 모델을 훈련시킬때 data가 neural network로 들어간다.
- 에이전트가 성공적으로 배우게 하기 위해서는 정확한 information이 필요하다
- 좋은 문제해결 방법은 correct data를 가지고 있냐에 따라 달렸다
- 여기서는 Agent가 collect하는 data는 다음과 같다.
- Position of the target
- Agent only collect z,x coordinates
Vector3 relativePosition = Traget.position -this.transform.position;
AddVectorObs(relativePosition.x / 5);
AddVectorObs(relativePosition.z / 5);
- edge of the plaform으로부터 distance
AddVectorObs((this.transform.position.x + 5) / 5); AddVectorObs((this.transform.position.x - 5) / 5); AddVectorObs((this.transform.position.z + 5) / 5); AddVectorObs((this.transform.position.z - 5) / 5); - Agent의 Velocity
AddVectorObs(rBody.velocity.x / 5);
AddVectorObs(rBody.velocity.z/5);
- 모든 value는 5로 나누어 normalize 해주었다.
Total of CollectObservations
public override void CollectObervations()
{
# Relative position 계산
Vector3 relativePosition = Traget.position -this.transform.position;
# Relative position
AddVectorObs(relativePosition.x / 5);
AddVectorObs(relativePosition.z / 5);
# Distance to edge of the platform
AddVectorObs((this.transform.position.x + 5) / 5);
AddVectorObs((this.transform.position.x - 5) / 5);
AddVectorObs((this.transform.position.z + 5) / 5);
AddVectorObs((this.transform.position.z - 5) / 5);
# Velocity
AddVectorObs(rBody.velocity.x / 5);
AddVectorObs(rBody.velocity.z/5);
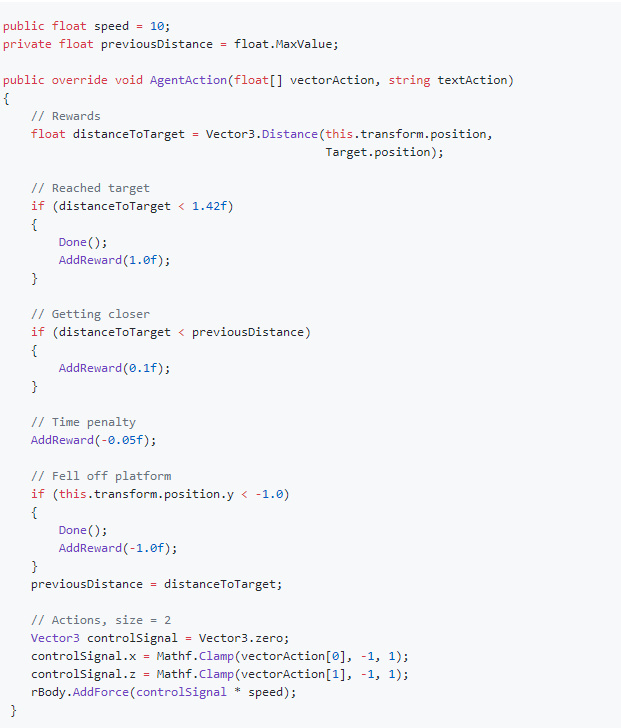
Actions
- Agent Action()을 통해 Brain은 action array를 받는다.
- Roller agent의 action space는 continuous vector이고, 브레인으로부터 두개의 continuous control signal을 필요로 한다.
- action[0]은 x axis의 action[1]은 z axis의 action을 determine한다.( 만약 Agent의 움직임을 세 방향으로 줄 수 있게 한다면, vector action size는 3이 될것이다.)
ACtions
Vector3 controlSignal = Vector3.zero;
controlSignal.x = Mathf.Clamp(action[0] , -1,1);
controlSignal.z = Mathf.Clamp(action[1], -1,1);
rBody.AddForce(controlSignal * speed);
- action value의 range를
Action values range : -1 ~ 1의 Range로 하였다.
Reward
- Reiforcement learning에서는 적절한 Reward이 설정으로 Agent가 목표를 달성할수 있게한다.
- AgentAction()에 reward를 assin한다.
-
이 reward를 사용하여 agent가 action을 선택할때 optimal한 action을 determine할수 있게 한다.
- Roller Agent는 Target에 도착했을때 reward를 받는다. ``` float distanceToTarget = Vector3.Distance(this.transform.position, Target.position); // 타겟에 도착하면
if (distanceToTarget < 1.42f) { Done(); AddReward(1.0f); }
---
# Encourage the agent
- To Encourage the agent goes to target
// 가까워질때마다
if (distanceToTarget < previousDistance)
{
AddReward(0.1f); }
---
## Time이 지날때마다 penalty
// Time penalty AddReward(-0.05f);
## Agent가 밖으로 떨어질때
if (this.transform.position.y <- 1.0) { Done(); AddReward(-1.0f); }
---
# Action을 선택하는 로직은 다음과 같다.
---
---
# Final Editor step
<center><img src="https://github.com/Unity-Technologies/ml-agents/raw/master/docs/images/mlagents-NewTutAssignBrain.png" height="300"></center>
- Hierarchy를 선택
- RollerAgent GameObject
- Brain을 drag하여 표시된 부분에 넣는다. (Target, Floor도 넣어야한다)
---
# Space Type 설정
- Hierarchy -> Academy -> Brain 선택
- Inspector에서 properties를 다음과 같이 변경
Vector Observation Space Type = Continuous Vector Observation Space Size = 8 Vector Action Space Type = Continuous Vector Action Space Size = 2 Brain Type = Player
---
# 환경 테스트해보기
- 환경이 다 만들어졌으니 타겟과 에이전트가 잘 움직이는지 방향키로 컨트롤
- Brain 선택
- Brain type을 Player로 변경
- Continuous layer Action을 Expand 한다.
- Size를 4로 설정
- 아래와 같이 키를 맵핑한다.
Element Key Index Value Element 0 D 0 1 Element 1 A 0 -1 Element 2 W 1 1 Element 3 S 1 -1
```
실험

- w,s,a,d (키로 실험 해본다)
학습 시키기
- Brain Type을 Player에서 External로 바꾼다
- Training ML-Agents 에서 했던 방법과 동일하게 학습시킨다. 링크 : https://github.com/wonseokjung/Handmade_RL/blob/master/Tutorial/2_secondstory/Handmade_RL-2.pdf
완료
공식홈페이지에 나와있는 tutorial은 미흡한 점이 많습니다
이 튜토리얼로 진행해주세요.
Scripts: https://github.com/wonseokjung/Handmade_RL/tree/master/Tutorial/3_thridstory